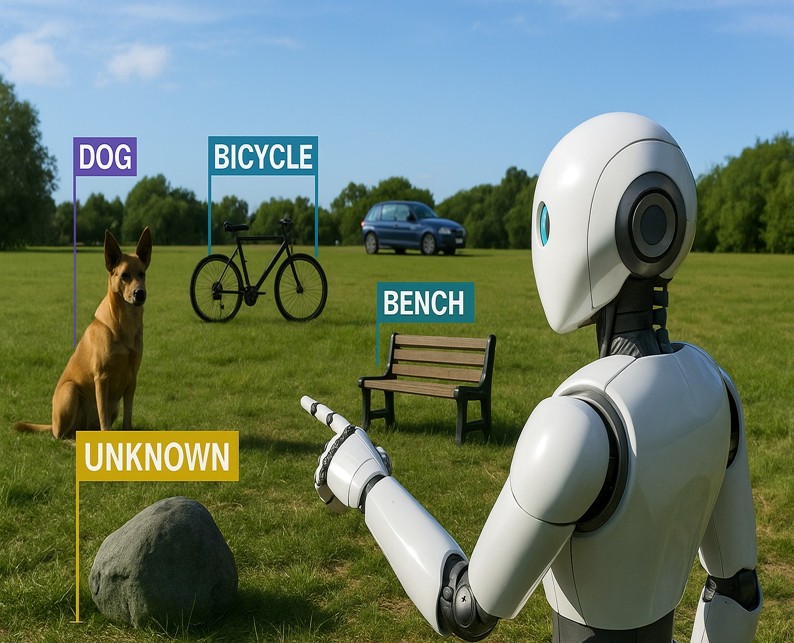
Seeing What Others Don’t: Detecting the Unknown
Gli attuali sistemi di intelligenza artificiale sono altamente efficaci nel riconoscere oggetti noti, ma spesso falliscono quando si trovano di fronte a oggetti sconosciuti, a causa della loro dipendenza da set di dati predefiniti. Questa limitazione comporta rischi per la sicurezza nei veicoli autonomi, errori operativi nella robotica e lacune nella sorveglianza. Per affrontare questo problema, viene proposto un framework di rilevamento oggetti indipendente dalla classe, che consente all’IA di rilevare la presenza di oggetti sconosciuti senza la necessità di informazioni preliminari sulla loro categoria. Questo approccio migliora l’affidabilità dell’automazione, riduce i rischi di fallimento in settori critici e apre la strada a una percezione simile a quella umana nei robot che operano in ambienti aperti.
A cura di: Dania Batool, Liliana Lo Presti, Marco La Cascia.
Questa attività è correlata alla seguente missione Horizon Europe:
- 100 città intelligenti e a impatto climatico zero entro il 2030
Questa attività è correlata ai seguenti SDG (Sustainable Development Goals):
SDG 9 Costruire un’infrastruttura resiliente, promuovere l’industrializzazione inclusiva e sostenibile
SDG 11 Rendere le città e gli insediamenti umani inclusivi, sicuri, duraturi e sostenibili
Organizzatore
L’Università degli Studi di Palermo, fondata nel 1806, con i suoi oltre 40000 iscritti è uno degli 11 mega Atenei italiani.
Venue
Piazzale di Ingegneria